Tag Archives: quad
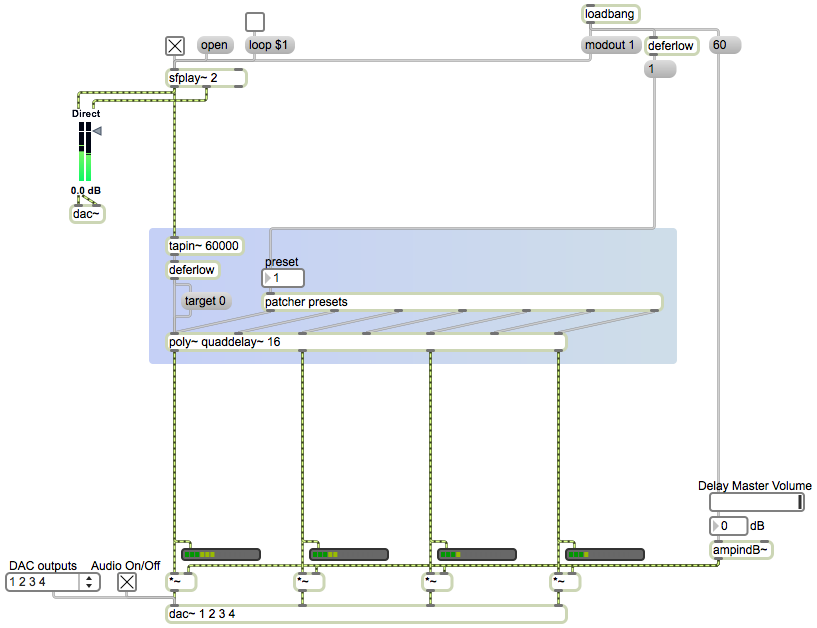
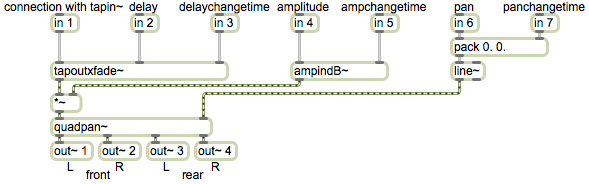
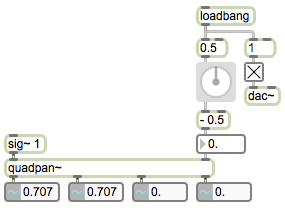
Abstraction for delay with quadraphonic panning
Image
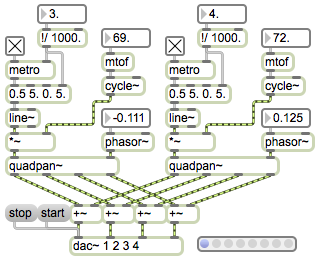
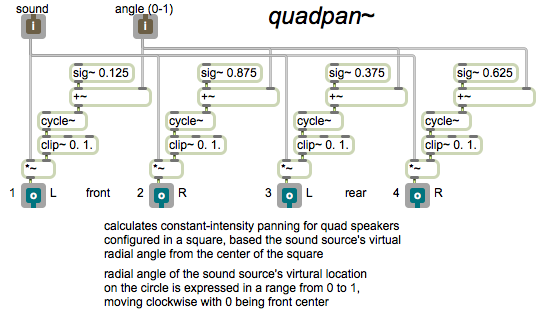
Circular quadraphonic panning
Image
Gain factors for quadraphonic panning based on radial angle
Image
Quadraphonic panning based on radial angle
Image
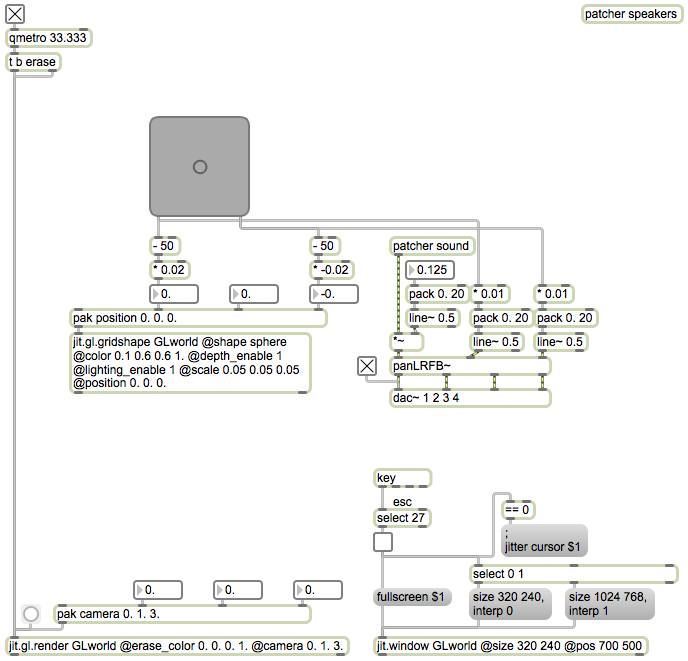
Quadraphonic panning with mouse control and Open GL visualization
Image
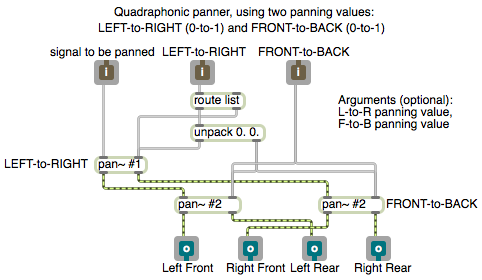
Abstraction for quad panning using x,y coordinates
Image
There are several standard and speaker configurations for 2-dimensional surround sound panning, such as quadraphonic (four speakers in a square or rectangular placement) and the 5.1 or 7.1 THX cinema surround specifications. There are also sound distribution encoding techniques that work for a variety of speaker configurations, such as the Ambisonics panning description, and there are processing techniques such as head-related transfer functions (HRTF) filtering.
This and the next few examples will show simple algorithms for intensity panning with a rectangular quadraphonic speaker configuration.
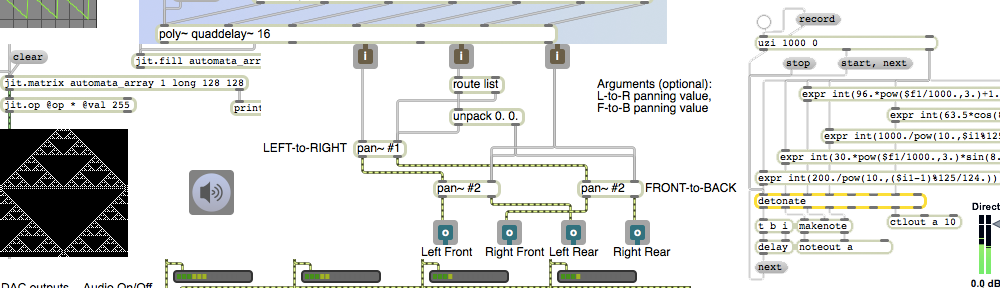
One way to implement two-dimensional panning is to specify the sound’s virtual location as a x,y coordinate point on a rectangular plane representing the floor of the room, with a speaker at each corner of the plane. The x value can be used to represent the left-right panning (0 to 1, going from left to right) and the y value represents the front-back panning (0 to 1, going from front to back). For some purposes, simple linear panning might suffice (or even be found to be preferable). I usually prefer to use a constant intensity panning algorithm. So I use the pan~ abstraction to calculate the amplitudes that will provide the left-to-right panning illusion, and then I use two other pan~ objects to pan each of those gains (the left and right amplitudes) from front to back.
This patch is an abstraction that enacts that plan. (It requires that the pan~ abstraction be somewhere in the Max file search path.) You can use this to pan any signal to four speakers in a rectangular quadraphonic layout. It takes a signal in its left inlet, an x coordinate in its second inlet, and a y coordinate in its right inlet. Similarly to the pan~ abstraction, it allows the panning coordinates to be specified as initial arguments, floats in the 2nd and 3rd inlets, or as signals.