The work shown here is part of the result of my Master’s Project at the Mechanical and Aerospace Engineering department at University of California, Irvine. I started working on the project in the beginning of 2011 and finished during the first quarter of 2012.
The primary goal of this project consisted in exploring the possibilities of using an (at the time brand new) Microsoft Kinect input device as a sensor. The sensor was to be mounted on top of a mobile platform which was to be able to react to inputs from the Kinect to perform basic maneuvers: for instance, obstacle avoidance. Because of the lack of native Windows drivers (the project was started at the beginning of 2011), Linux (Ubuntu in particular) was the OS of choice for the project. ROS (Robot Operating System) C-Turtle provided a framework in which to process the inputs from the Kinect and output (via serial port) the processed signals to an Arduino microcontroller.
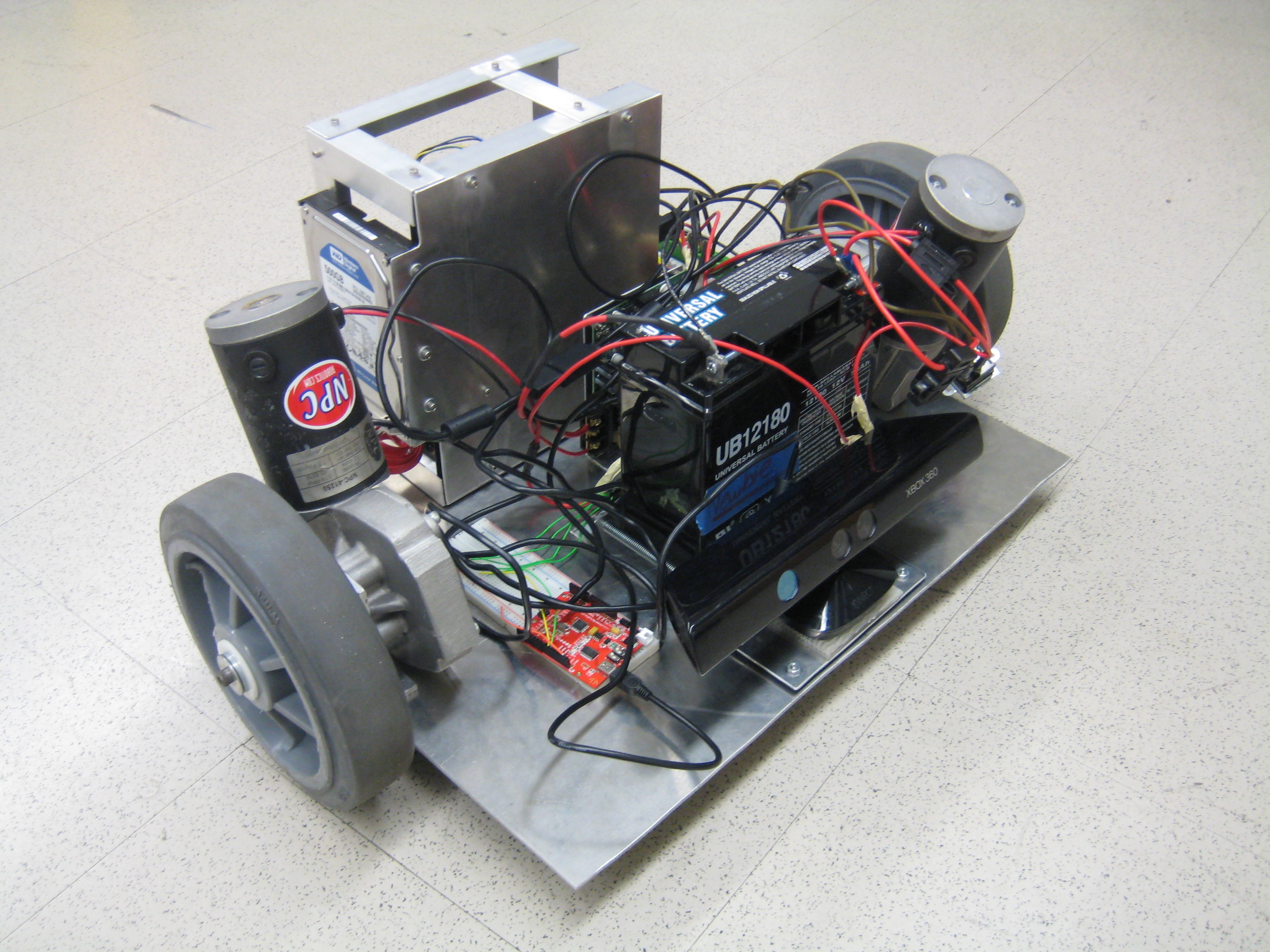
The mobile platform was equipped with two DC motors with wheels that were enough for the platform to move forwards/backwards and turn left/right. On top of the platform, there were the rest of the components: Kinect, microcontroller, computer, battery, and motor driver.
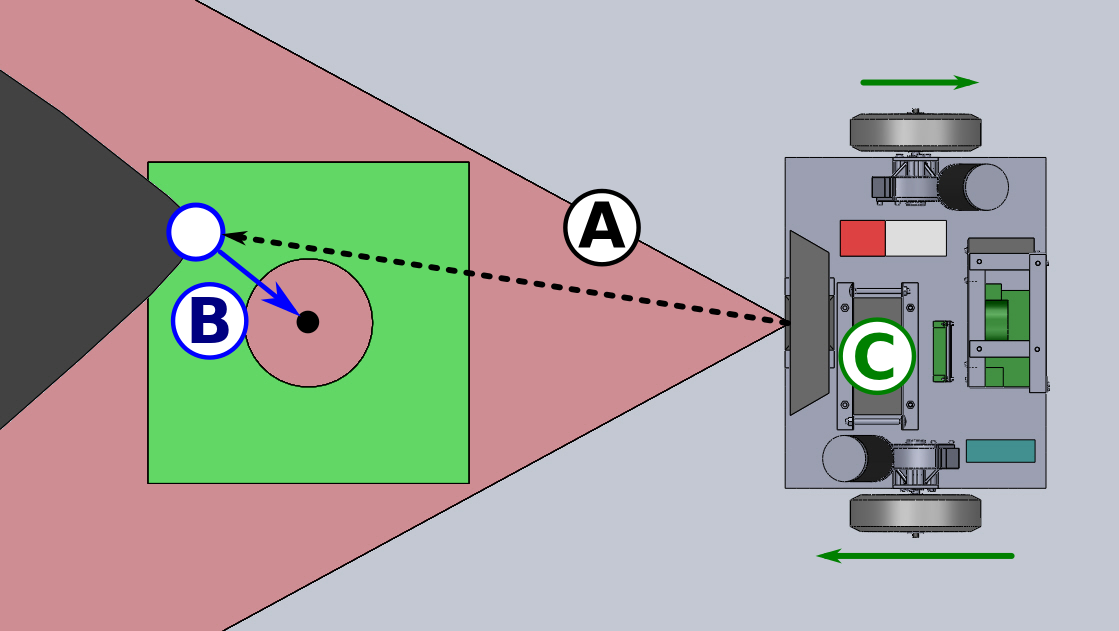
The platform was set up to maneuver so the closest obstacle remained in a region in front of the platform. This allowed the platform to follow a moving obstacle, for instance, a walking human. This poster, provides a good overview of the project.