We have 31 undergraduate students currently participating in the pilot + 3 undergraduate mentors (as of Winter 2019). Some of their feedback is posted here for your reference.
Reference files specific for this page can be found on the UCI TI RSLK GoogleDrive.
General Tips & Tricks
NOTE on downloading Code Composer Studio: we recommend downloading the offline installer instead of online installer. some students seem to have issues downloading or installing the latest version (version 8) – permission & install issues. Affected students resolved their issue by installing an older version (version 7).
Assembly Notes from QV:
Also, when cutting the connections (like from VPU & VREG, etc), you just have to make sure the connection is severed visually. You can verify with a multimeter in the ohm/continuity setting. If it remains open (or in the k-ohms), you are good to go. If the ohm reading is 0 or 0.04 or so ohms, you need to cut away a little more solder. A box cutter/screwdriver/razor works fine for this task.
When mounting the LaunchPad to the chassis, we suggest mounting the stand-offs to the LaunchPad first, and then figure out where it lines up on the chassis. You just need to have it mounted; it doesn’t matter too much exactly where. After our 3d printer is setup, we can print out TI’s alternative mounting solution that provides a much easier to mount & debug setup.
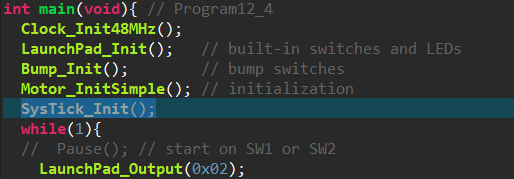
Lab 12 Note from Austin Zwirn: For the Simple Motor Lab (Lab 12), the function call “SysTick_Init()” needs to be included in Lab12_Motorsmain.c. This is not initially included in the file, which caused the Motor_ForwardSimple() function to become stuck in an infinite loop. Make sure this function call is included in your main, right below Motor_InitSimple(). I’ve included an image of where this should be inserted.
Tips & Tricks for RSLK by Derrell Record
For this series of tutorials, Derrell will be going through the labs in an alternative order (outlined on the GoogleDrive Flow Chart) that prioritizes what he found interesting & wanted to test first.
General Debugging Advice: In this video, Derrell goes through his debugging process for the TI RSLK (many tips also apply to general debugging). Reference pdf can be found here.
Tutorial #1: In this tutorial, Derrell Record walks through the first parts of the TI RSLK Getting Started & Modules with his comments and advice on things that were confusing for him while going through it.
Before continuing to Tutorial #2, you should have gone through Modules 1-3 (or at least 1).
Tutorial #2: For this tutorial, Derrell reviews Lab 12 (simple motor control). This video covers multiple topics related to programming the TI RSLK motors. Core concepts, such as how to set a pin type to GPIO, how to set pin I/O type to Input or Output, and how to set the output value or get the input value of a pin are covered. We will also discuss how to create a time delay, how to start/stop the motor, how to change the speed of the motor, and how to change directions. Associated notes & c code can be found here.
Lab 6 Notes: the lab 6 video is very straight forward, so for this one, Derrell provides some written notes for for the line sensor module that he thought would be helpful for those going through this lab.
Mac Feedback / Differences by Yi Zhuang
For those of you on Mac, the videos are for PC & CCS will have different button images/locations. Yi is currently going through the tutorials and documenting the differences. You can find her documentation here.
As additional feedback, TexasDisplay.exe will not run on Mac. For the purposes of the robot, you will not need to complete that portion of the lab. You can do similar testing w/ our oscilloscopes in lab (please still go through the module/lab to get a reference of what it is capable of doing).
Advanced Projects
Integrating ultra-sonic sensors into the TI RSLK robot, by Derrell Record: https://www.hackster.io/125747/texas-instruments-rslk-with-ultrasonic-distance-sensors-7ee15d